Research
Math-CVML is a research group within the Centre for Mathematical Sciences. The research within the group can roughly be divided into geometric computer vision, cognitive vision and medical image analysis. Here follows a description of research themes we pursue within the group. Our research can also be understood in terms of our external projects. Click on Funded Projects to read more about our current externally funded projects. We encourage you to also study our list of Publications.
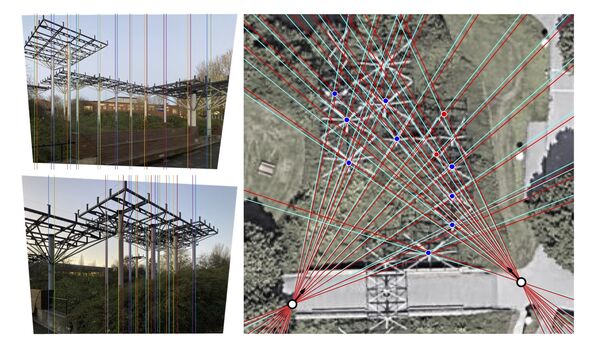
Multiple View Geometry
Within this research theme we study the interplay between images, 3D scene models and camera position and orientation. One typical problem is trying to calculate scene structure and camera motion given only image data. The underlying framework for studying the geometry of images is based on projective geometry. Our research covers both theory and algorithms and typical applications are: large scale 3D reconstructions, image based localization, autonomous navigation, panoramic image stitching, camera calibration, etc
KalleAstrom by kalleastrom on Sketchfab
Medical Image Analysis
Medical Image Analysis is a growing field where the need for automatic tools are increasing. Problems include detection, segmentation, visualization and decision support for diagnosis. We cooperate with a number of hospitals and work on real data, developing mathematical theory, algorithms, and prototype applications. We are working with a variety of image modalities such as ultrasound images, microscopy images, MRI and CT with different diagnostic problems such as automatic cancer detection and grading, research of alzheimers disease, tissue segmentation etc. Our research methods consists of different machine learning techniques, with an emphasis on deep learning with convolutional neural networks.
Global Optimization Methods
Many mathematical problems in vision are non-convex and traditional local optimization methods risk getting stuck in local optima. The goal is to develop new global approaches, independent of initialization, with performance guarantees.
Cognitive Vision
Cognition is defined as "the process of knowing, understanding and learning things". Cognitive vision includes abilities to generate explicit representations of the world in terms of structures, objects and events, and their relations and dynamics, for action generation or communication. Our research within cognitive vision is focused on problems such as categorization and detection of objects and events in images, shape variation, learning, and context in computer vision.
Variational Calculus in Image Analysis
Curve and surface problems appear naturally within the field of computer vision. For example, often one wants to find the minimal surface of an energy functional in order to reconstruct the shape of an object or one wants to find the optimal curve for segmenting a noisy image.
Polynomial Equations in Vision
A central part of many geometric computer vision systems is an algorithm which solves for geometry and calibration from a small number of point correspondences between images. A fast and efficient way of doing this is to formulate the problem as a system of polynomial equations and then numerically extracting the zeros. For linear systems one can do this effortlessly in large scale. However, for polynomial equations, the picture is much more complicated and there are no known, well functioning, general purpose methods. We try to combine algebraic geometry with efficient computational techniques to come up with new efficient methods for numerical treatment of polnomial equations. -> Polynomial equations arise in many geometric computer vision problems. Contrary to the situation with linear systems, where one can solve large systems extremely efficiently, the picture is here much more complicated. We try to combine algebraic geometry with efficient computational techniques to come up with new numerical methods for polynomial equations.
Vision in Robotics
To give an industrial robot of today a new task, quite a lot of programming work is required as it is done on a very low level. This research tries to lift the programming to a higher level at which different kinds of sensors are used. That information can then be used as primitives in the programming and to build safe robots that can work together with humans without putting the human at risk of being hurt.
Biological Vision
In this multidisciplinary theme we work together with researchers in biology. We investigate how visual systems are built and evolve, and how this knowledge of biological systems can be extended to machine vision. For instance primitive visual systems in lower animals typically serve only one or a few visual tasks, and their simple and machine-like features are excellent sources for bio-inspired new technologies in machine vision and robotics.
Smart Cities and Traffic Safety Analysis
By analysing the motion of road users it is possible accurately predict the number of accidents that will occur and thereby asses how safe it is. Today this process is performed manually with observers spending several days standing in the intersections. This research aims at automating the process by using video analytics and surveillance cameras.
Animal analysis
The project aims to identify biomarkers of animal health and welfare in order to increase knowledge of animal behavior and basic needs in general, and the importance of locomotion disorders in particular. With larger herds and higher production requirements less space is given for supervision of the individual animal.